K-Nearest Neighbour & K-Means
Lecture 5
Problem statement
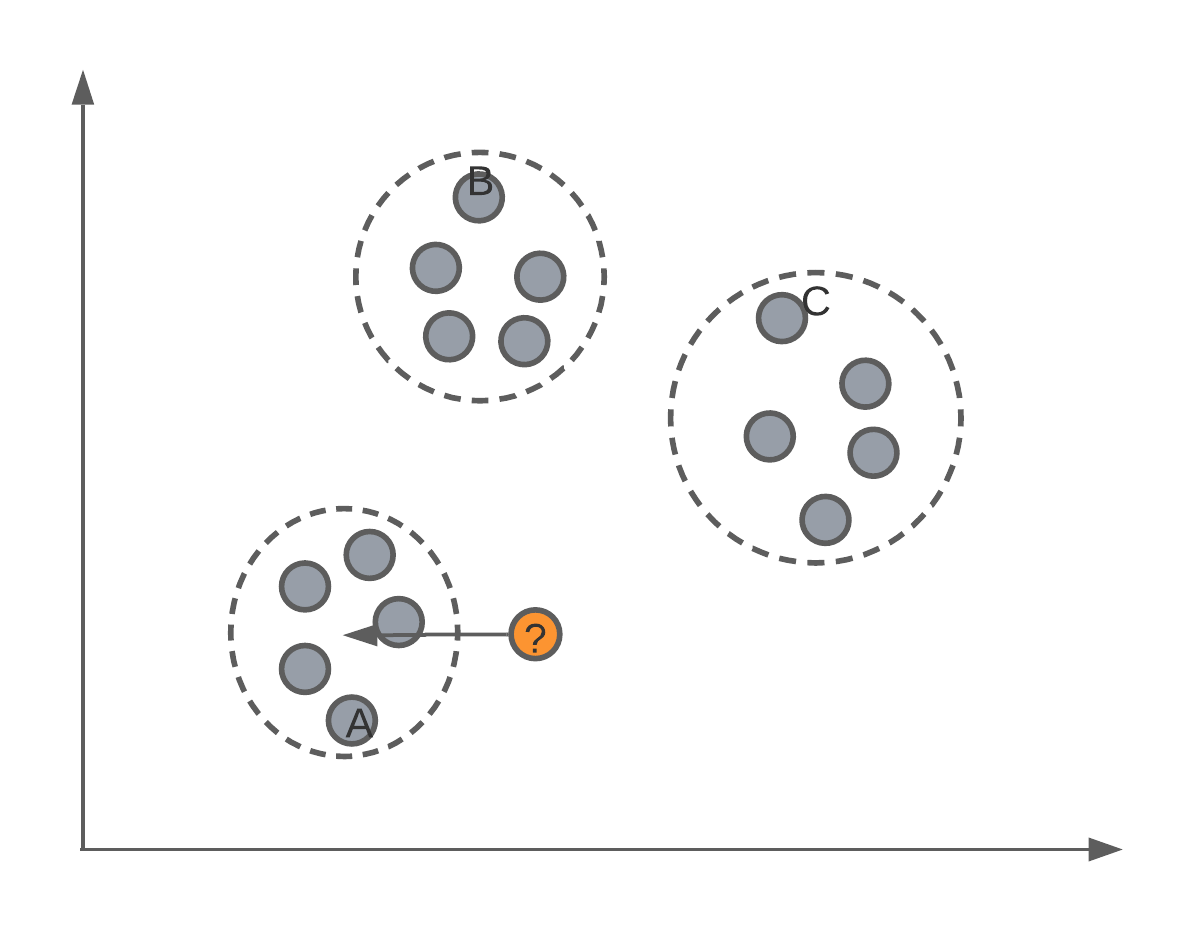
The first algorithm we’re going to see today is a very simple one. Let’s image we have a feature space with labelled data points, such as this:
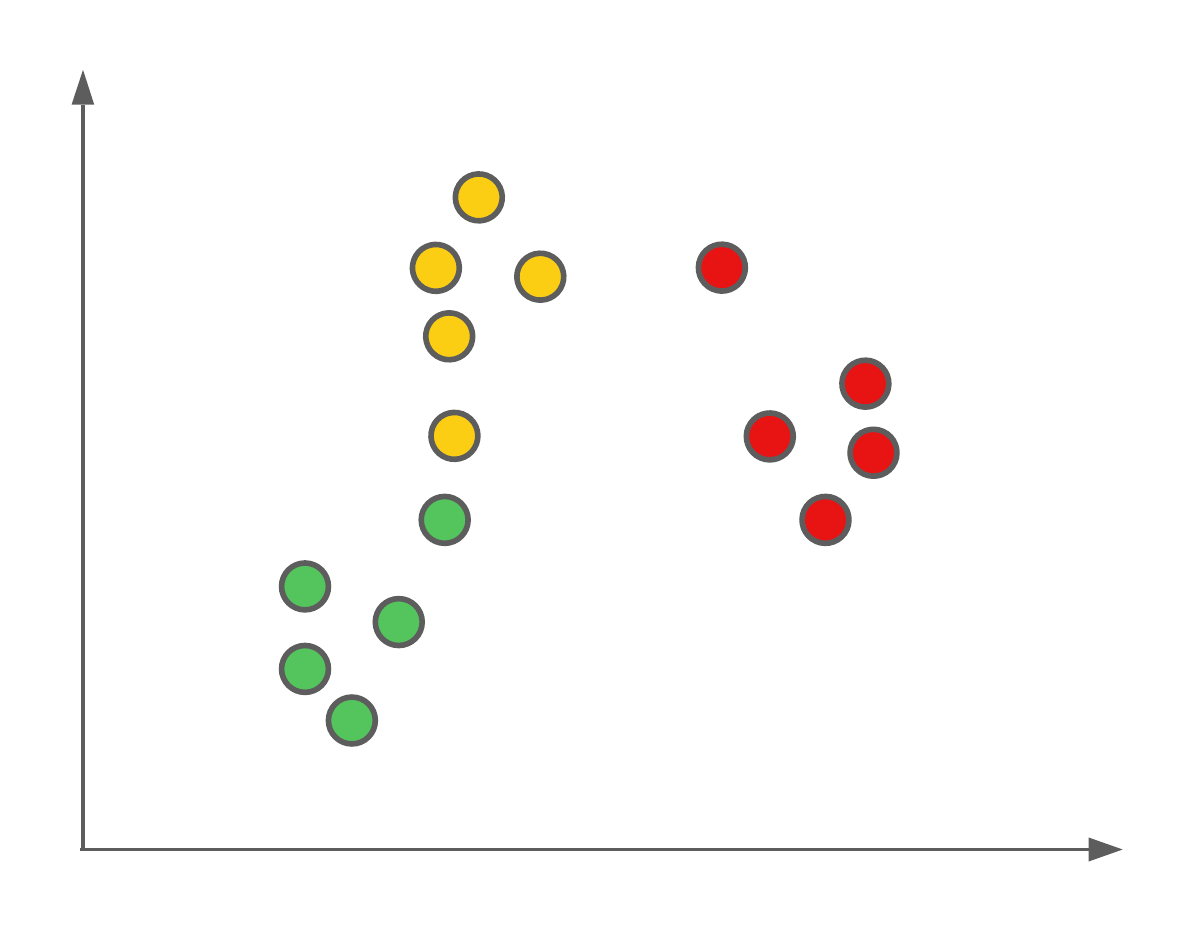
We want to use these labelled data points as our training data to be able to predict the classification of new data points (such as those from our testing set).
The algorithm we’re going to use to do this classification is called K-nearest neighbour, or kNN for short. This algorithm isn’t mathematically derived as some others we’ve seen, but rather based on intuition.
Example solution
kNN is a classification algorithm where, we as the user, get to set \(K\) ourselves. \(K\) is the number of neighbours that will be considered for the model’s classification.
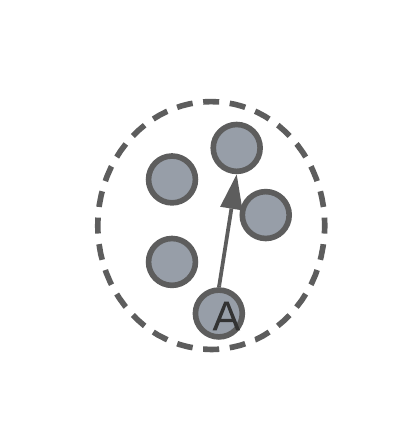
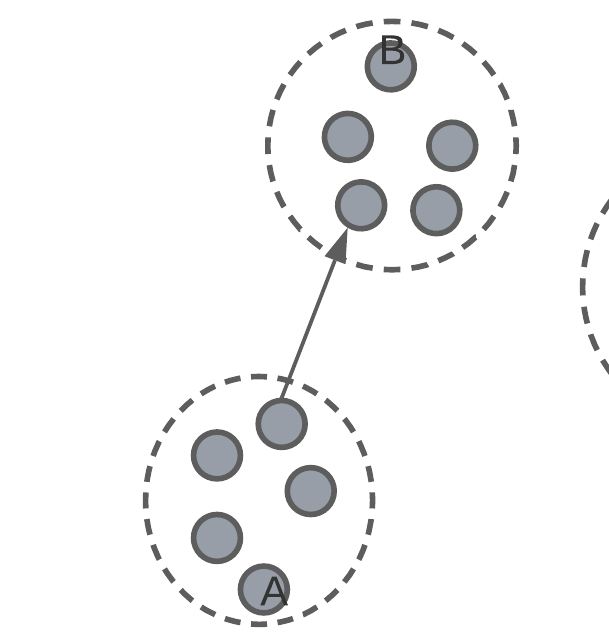
Neighbour’s of a new data point can be determined using the euclidean distance, and selecting \(K\) closest points.
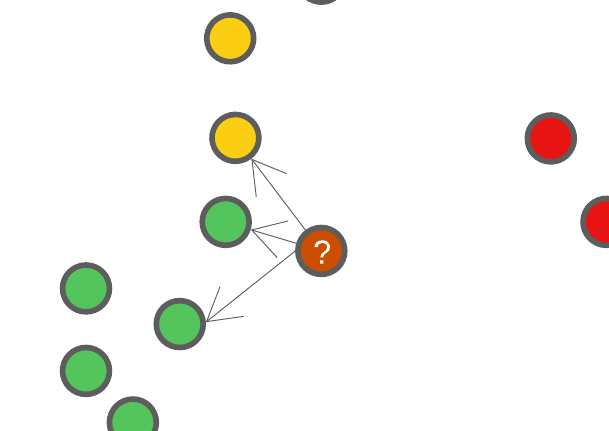
Let’s say we set \(K=3\), this means that when we have a new data point we want to classify, we’re going to find out where this new data point falls in the feature space, and find 3 of it’s closest neighbours. Using these closet neighbours, we will assign this new data point the same class as the class majority of it’s neighbours.
The effect of \(K\)
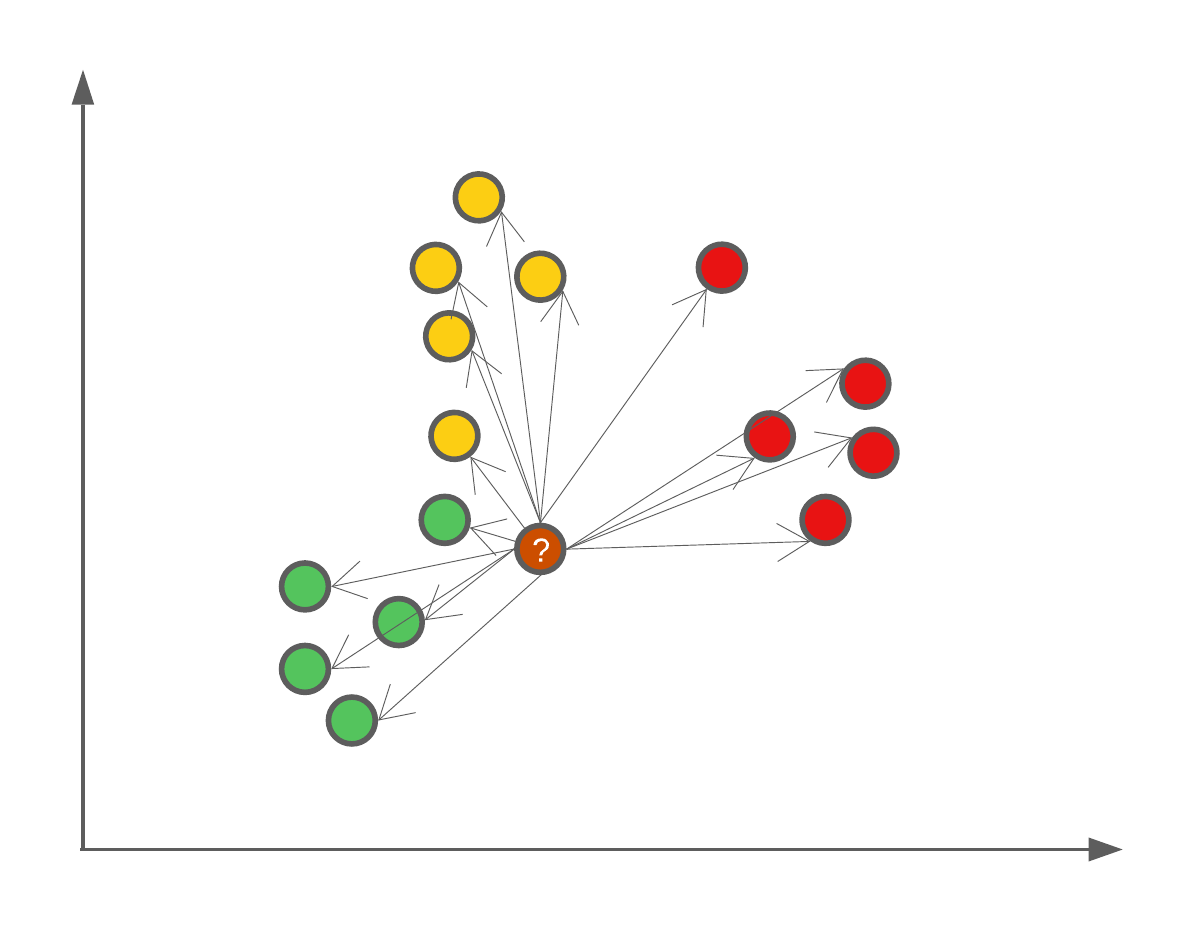
\(K\) in the kNN algorithm is user defined, and the larger the number, the more neighbours will be used. One fun example of the effect of \(K\) is that if we were to set \(K=N\) where \(N\) is the number of data points in our training set, then we will always assign new data points the majority class.
Problem statement
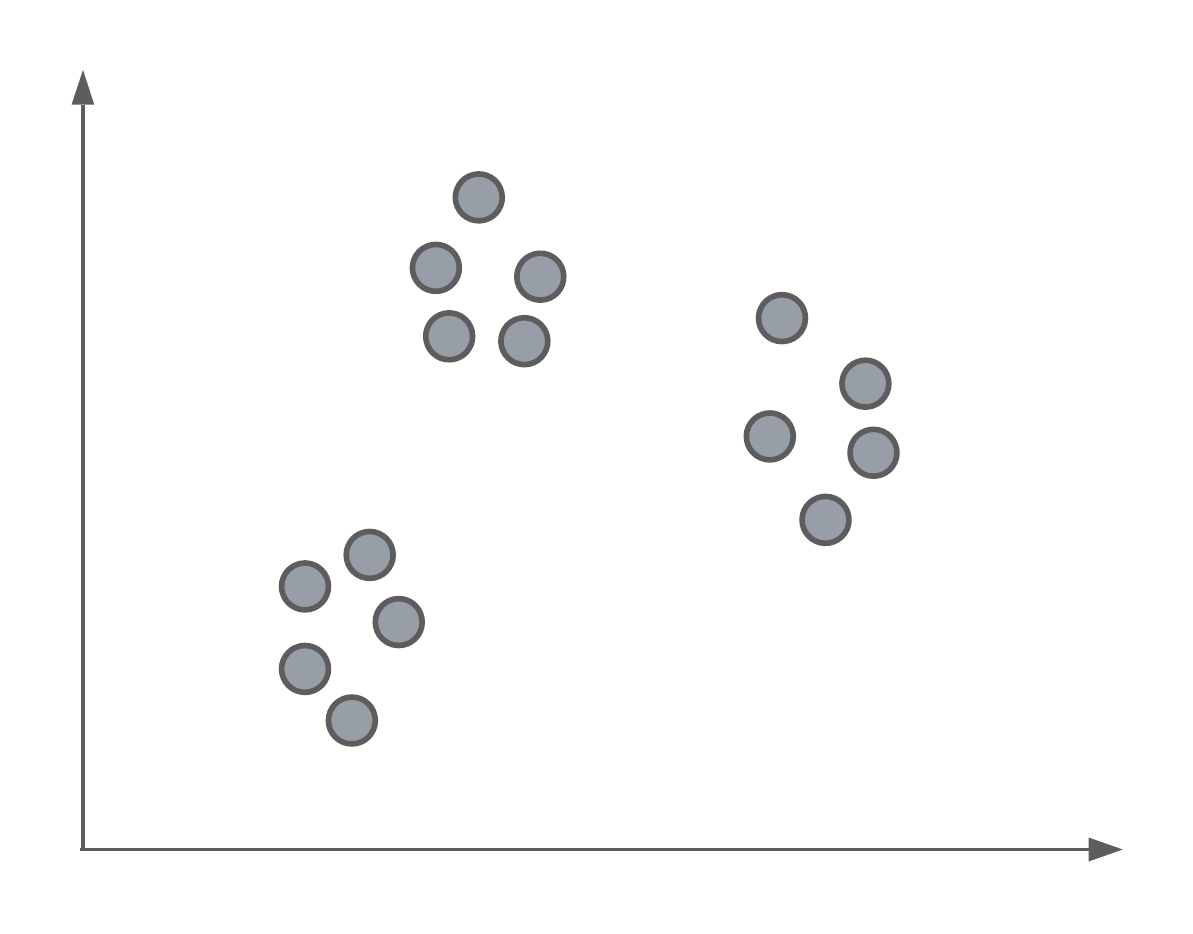
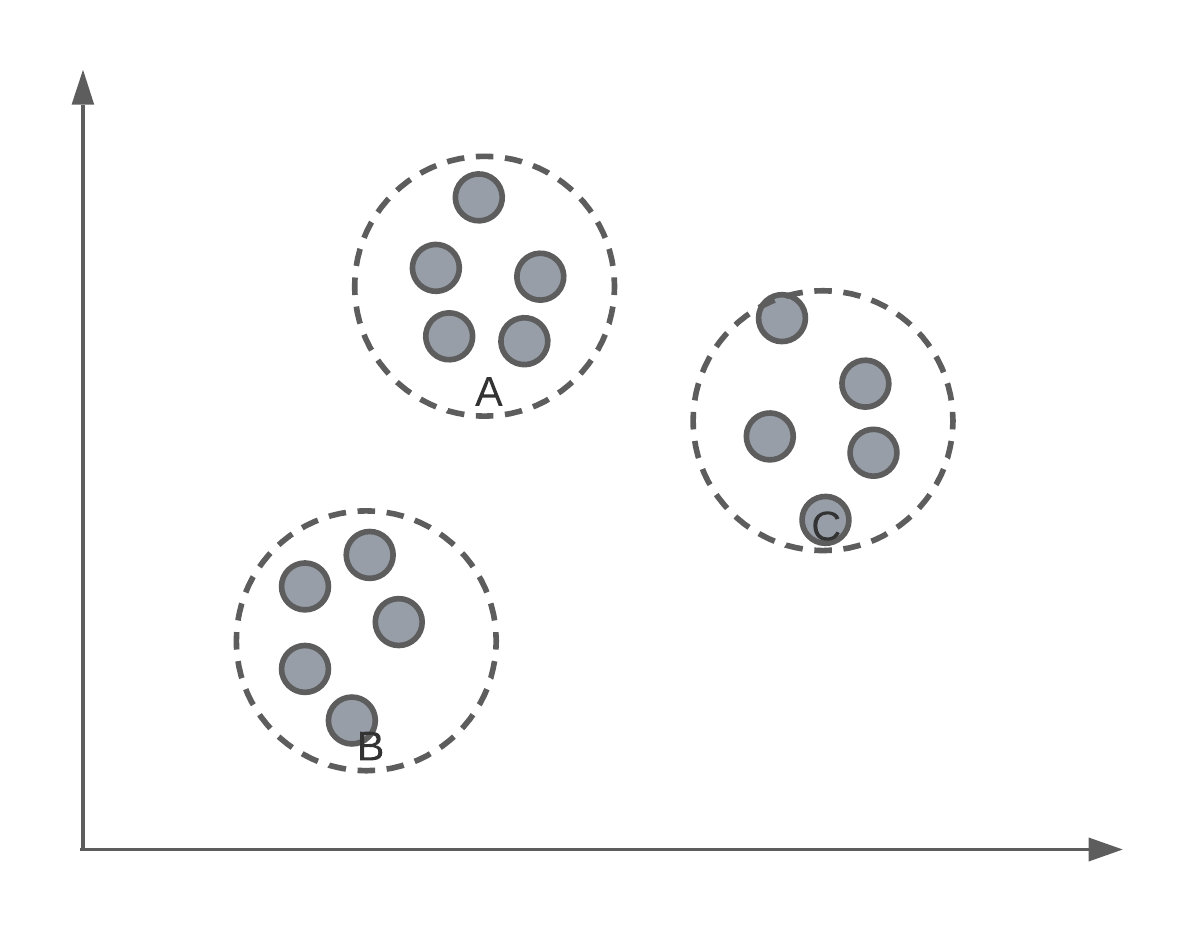
Say we had a set of data, un-labelled data, and we wanted to separate them into groups or classes. Below we have an example where, as humans, we can see 3 distinct groups of data points. In today’s lecture, we’re going to look at an algorithm that can identify these same clusters or groups systematically.
K-Means clustering
This algorithm is called K-means. In essence, it is an algorithm that finds \(K\) different clusters or groups of points, where \(K\) is defined by the user.
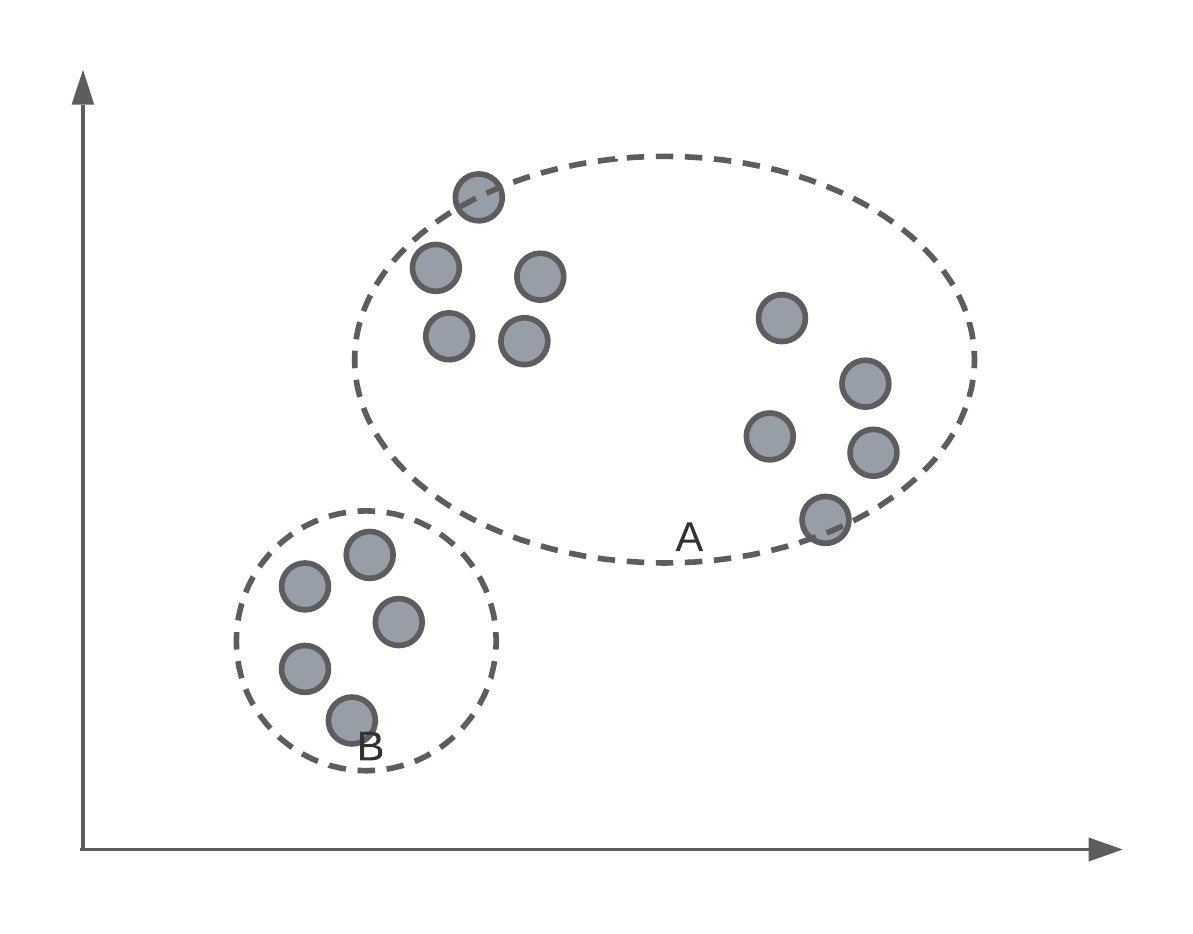
Of course, we have to, ourselves, pick a value of for \(K\). For data that has more than 3-dimensions, we might not know how many groups there are inherently in the data.
Starting point
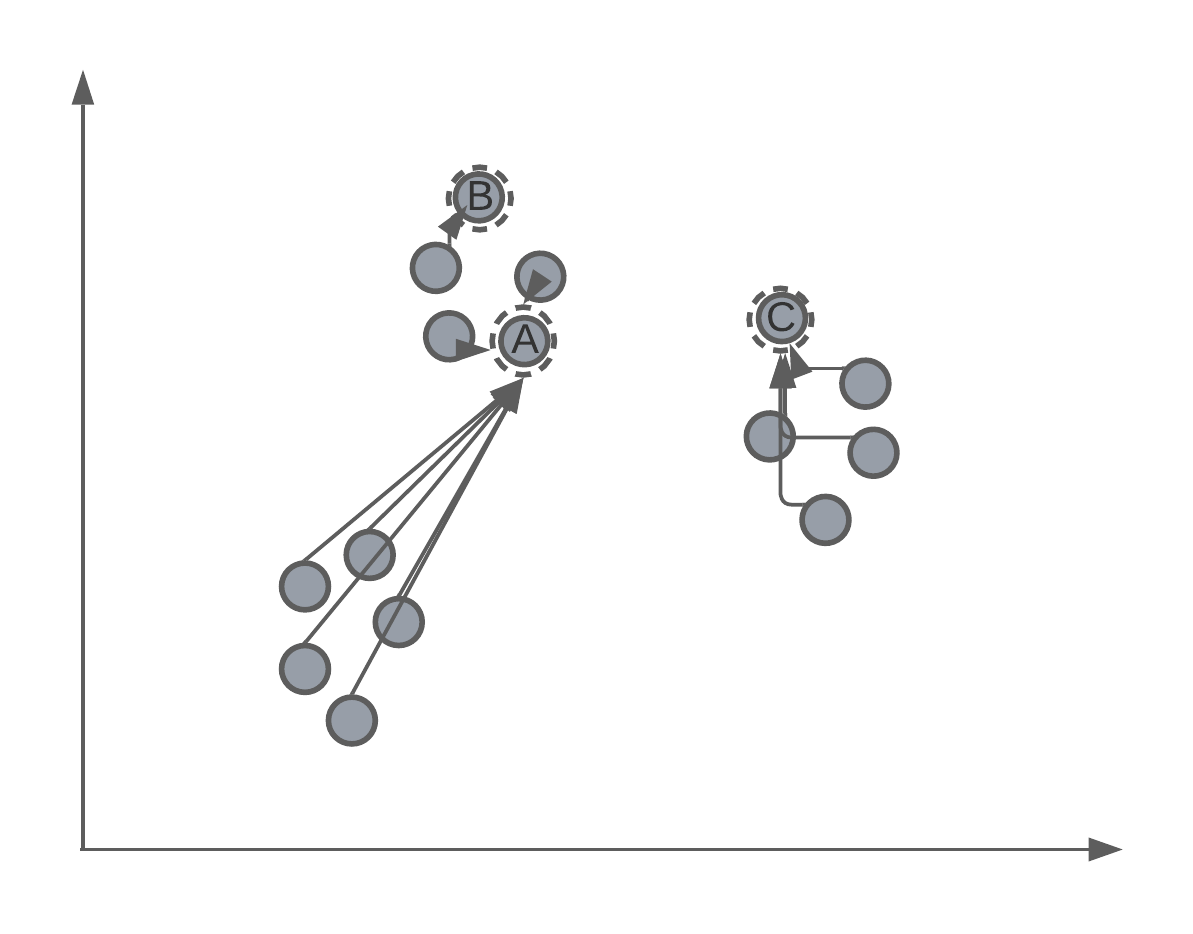
K-means is an iterative algorithm, which means that the centroids of the clusters will be randomly assigned in the feature space. Let’s say that we initialise a K-means algorithm with \(K = 3\). We might have something that looks like:
Iterative process
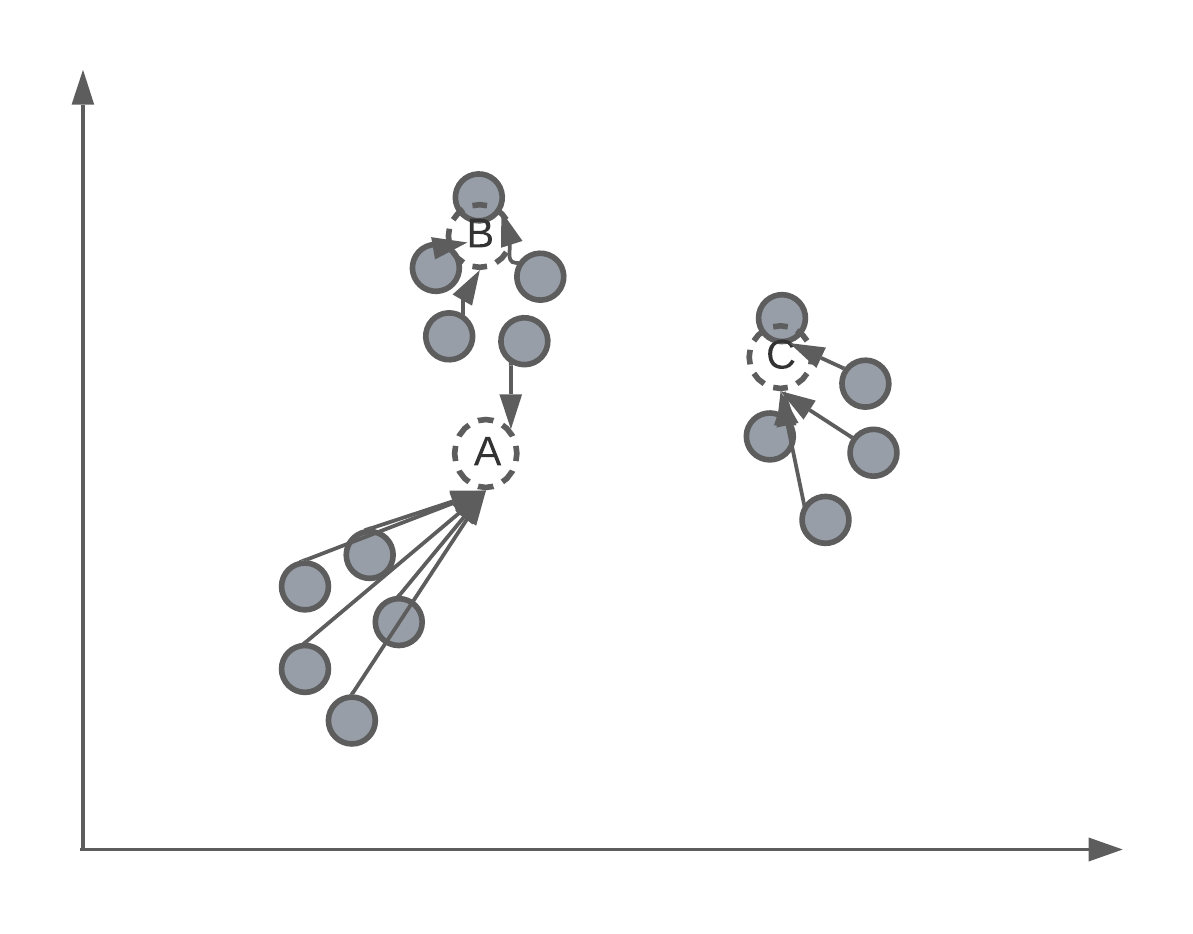
As mentioned, K-means is an iterative process of assigning the position of the cluster’s centroid. Therefore, after randomly assigning each centroid to a different point in the feature space, the algorithm will iteratively move the centroid to better match the true clustering of data points. We’ll get back to how this is mathematically done later in the lecture, but for now we want to understand this intuition.
Assigning centroids
After the algorithm has converged or stopped, we will have 3 centroids, that will, hopefully, match the true clustering of data points.
After we have these positioned centroids, they can be used to label new data points by determining to which cluster do the new data points fall under, or are closet to.
Evaluation of K-means
Since we don’t have true labels with which to evaluate the k-means algorithm against, we must take a different tactic for evaluating the classifications or group of points it has clustered together. This works by evaluating the structure of the clusters.
intra-cluster distance – the average distance between all data points in the same cluster.

intra-cluster diameter – the distance between the two most remote objects in a cluster.
Inter-cluster distance
inter-cluster distance – average smallest distance to a different cluster.
silhouette score – \(\frac{\text{intra} - \text{inter}}{\max(\text{intra}, \text{inter})}\)